Underwater Acoustic Ray Tracing in the SOFAR(Sound Fixing and Ranging) Channel using Python
Underwater Acoustic Ray Tracing in the SOFAR(Sound Fixing and Ranging) Channel using Python
Underwater Acoustic Ray Tracing in the SOFAR(Sound Fixing and Ranging) Channel using Python
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
import seaborn as sns
sns.set()
from tqdm import tqdm
from IPython.display import HTML, display, Image
from matplotlib import animation
# SPEED_OF_SOUND_SURFACE = 1480 # meters / second
SOUND_SPEED_MIN = 1480
SOUND_SPEED_MAX = 1530
DEPTH_MIN = 0 # Ocean Surface
DEPTH_MAX = 5500 # meters
DEPTH_MIN_SPEED = 1100 # depth where minimum speed of sound is observed
DEPTH_RANGE = np.arange(DEPTH_MIN, DEPTH_MAX + 1)
SOUND_GRADIENT_SHALLOW = (SOUND_SPEED_MIN - SOUND_SPEED_MAX) / (DEPTH_MIN_SPEED - DEPTH_MIN)
SOUND_GRADIENT_DEEP = (SOUND_SPEED_MAX - SOUND_SPEED_MIN) / (DEPTH_MAX - DEPTH_MIN_SPEED)
# vectorize the sound gradients
# sound velocity gradient up to 1100 meters deep
sound_grad_shallow_vec = np.full(
(1, np.argwhere(DEPTH_RANGE == DEPTH_MIN_SPEED)[0][0]),
SOUND_GRADIENT_SHALLOW
)
# sound velocity gradient beyond 1100 meters
sound_grad_deep_vec = np.full(
(1, np.argmax(DEPTH_RANGE) - np.argwhere(DEPTH_RANGE == DEPTH_MIN_SPEED)[0][0]),
SOUND_GRADIENT_DEEP
)
# construct the sound velocity profile
sound_velocity_profile = SOUND_SPEED_MIN + \
(DEPTH_RANGE[:-1] - DEPTH_MIN_SPEED) * \
np.append(sound_grad_shallow_vec, sound_grad_deep_vec)
# plot the sound velocity profile
fig = plt.figure(figsize=(8,6))
plt.plot(sound_velocity_profile, DEPTH_RANGE[:-1])
plt.plot([SOUND_SPEED_MIN],[DEPTH_MIN_SPEED], 'ro')
plt.gca().invert_yaxis()
plt.ylabel('Depth (m)')
plt.xlabel('Sound Velocity (m/s)')
plt.show()

SOURCE_DEPTH = DEPTH_MIN_SPEED
SOURCE_SOUND_SPEED = SOUND_SPEED_MIN
TRANSMISSION_ANGLE_RANGE = np.deg2rad(np.arange(-10, 11, 1)) # angle of transmission in rad
angle_0_ind = np.argwhere(TRANSMISSION_ANGLE_RANGE == 0)[0][0] # index of the 0 degree mark
SIMULATION_STEPS = 20 # meters
SIMULATION_RANGE = np.arange(0, 200e3 + SIMULATION_STEPS, SIMULATION_STEPS)
# Instantiate our matrices
R = np.zeros((len(TRANSMISSION_ANGLE_RANGE), len(SIMULATION_RANGE)))
z = np.zeros_like(R)
c = np.zeros_like(R)
theta = np.zeros_like(R)
# Prime the initial conditions
z[:, 0] = DEPTH_MIN_SPEED # we put the source at the depth of min sound speed
R[:, 0] = -SOURCE_SOUND_SPEED / np.append(
SOUND_GRADIENT_SHALLOW * np.cos(TRANSMISSION_ANGLE_RANGE[:angle_0_ind+1]),
SOUND_GRADIENT_DEEP * np.cos(TRANSMISSION_ANGLE_RANGE[angle_0_ind+1:]),
)
c[:, 0] = SOUND_SPEED_MIN
theta[:, 0] = TRANSMISSION_ANGLE_RANGE
for j in tqdm(range(1, len(SIMULATION_RANGE))):
for i in range(0, len(TRANSMISSION_ANGLE_RANGE)):
if (z[i, j-1] == SOURCE_DEPTH) and (theta[i, j-1] == 0):
c[i, j] = SOURCE_SOUND_SPEED
theta[i, j] = 0
dz = 0
z[i, j] = SOURCE_DEPTH
elif (z[i, j-1] < SOURCE_DEPTH) or (z[i, j-1] == SOURCE_DEPTH and theta[i, j-1] > 0):
R[i, j] = -c[i, j-1] / (SOUND_GRADIENT_SHALLOW * np.cos(theta[i ,j-1]))
theta[i, j] = np.arcsin(
SIMULATION_STEPS / R[i, j-1] + np.sin(theta[i, j-1])
)
dz = R[i, j-1] * (np.cos(theta[i, j-1]) - np.cos(theta[i, j]))
z[i, j] = z[i, j-1] + dz
c[i, j] = SOURCE_SOUND_SPEED + SOUND_GRADIENT_SHALLOW * (z[i, j] - SOURCE_DEPTH)
elif (z[i, j-1] > SOURCE_DEPTH) or (z[i, j-1] == SOURCE_DEPTH and theta[i, j-1] < 0):
R[i, j] = -c[i, j-1] / (SOUND_GRADIENT_DEEP * np.cos(theta[i ,j-1]))
theta[i, j] = np.arcsin(
SIMULATION_STEPS / R[i, j-1] + np.sin(theta[i, j-1])
)
dz = R[i, j-1] * (np.cos(theta[i, j-1]) - np.cos(theta[i, j]))
z[i, j] = z[i, j-1] + dz
c[i, j] = SOURCE_SOUND_SPEED + SOUND_GRADIENT_DEEP * (z[i, j] - SOURCE_DEPTH)
100%|██████████| 10000/10000 [00:03<00:00, 3283.26it/s]
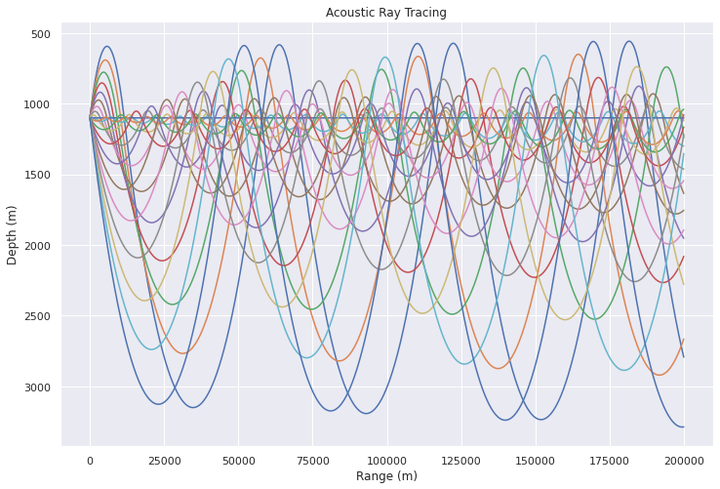
plt.figure(figsize=(12,8))
for i in range(0, len(TRANSMISSION_ANGLE_RANGE)):
plt.plot(SIMULATION_RANGE, z[i])
plt.gca().invert_yaxis()
plt.title('Acoustic Ray Tracing')
plt.xlabel('Range (m)')
plt.ylabel('Depth (m)')
plt.show()

duration_sec = 2
dpi = 100
bitrate = 100
fig, ax = plt.subplots(dpi=dpi)
fig.text(0.89, 0.14, '@Jay Patel',
fontsize=12, color='black',
ha='right', va='bottom', alpha=0.75)
fps = len(SIMULATION_RANGE) // duration_sec
GifWriter = animation.ImageMagickFileWriter(fps,
bitrate=bitrate
)
save_filename = 'SOFAR_ray_trace.gif'
with GifWriter.saving(fig, save_filename, dpi=dpi):
for i in range(0, len(SIMULATION_RANGE) + 75, 75):
plt.cla()
ax.set_xlim(0, SIMULATION_RANGE[-1])
ax.set_ylim(500, 3500)
ax.set_title(f"Acoustic Ray Tracing \nSOFAR Channel")
plt.gca().invert_yaxis()
plt.xlabel('Range (m)')
plt.ylabel('Depth (m)')
for a in range(0, len(TRANSMISSION_ANGLE_RANGE)):
ax.plot(SIMULATION_RANGE[:i], z[a,:i])
GifWriter.grab_frame()
plt.close()

SOURCE_DEPTH = DEPTH_MIN_SPEED
SOURCE_SOUND_SPEED = SOUND_SPEED_MIN
TRANSMISSION_ANGLE_RANGE = np.deg2rad(np.arange(-20, 20, 1)) # angle of transmission in rad -20 to 20
angle_0_ind = np.argwhere(TRANSMISSION_ANGLE_RANGE == 0)[0][0] # index of the 0 degree mark
SIMULATION_STEPS = 20 # meters
SIMULATION_RANGE = np.arange(0, 200e3 + SIMULATION_STEPS, SIMULATION_STEPS)
# Instantiate our matrices
R = np.zeros((len(TRANSMISSION_ANGLE_RANGE), len(SIMULATION_RANGE)))
z = np.zeros_like(R)
c = np.zeros_like(R)
theta = np.zeros_like(R)
# Prime the initial conditions
z[:, 0] = DEPTH_MIN_SPEED # we put the source at the depth of min sound speed
R[:, 0] = -SOURCE_SOUND_SPEED / np.append(
SOUND_GRADIENT_SHALLOW * np.cos(TRANSMISSION_ANGLE_RANGE[:angle_0_ind+1]),
SOUND_GRADIENT_DEEP * np.cos(TRANSMISSION_ANGLE_RANGE[angle_0_ind+1:]),
)
c[:, 0] = SOUND_SPEED_MIN
theta[:, 0] = TRANSMISSION_ANGLE_RANGE
for j in tqdm(range(1, len(SIMULATION_RANGE))):
for i in range(0, len(TRANSMISSION_ANGLE_RANGE)):
if (z[i, j-1] == SOURCE_DEPTH) and (theta[i, j-1] == 0):
c[i, j] = SOURCE_SOUND_SPEED
theta[i, j] = 0
dz = 0
z[i, j] = SOURCE_DEPTH
elif (z[i, j-1] < SOURCE_DEPTH) or (z[i, j-1] == SOURCE_DEPTH and theta[i, j-1] > 0):
R[i, j] = -c[i, j-1] / (SOUND_GRADIENT_SHALLOW * np.cos(theta[i ,j-1]))
theta[i, j] = np.arcsin(
SIMULATION_STEPS / R[i, j-1] + np.sin(theta[i, j-1])
)
dz = R[i, j-1] * (np.cos(theta[i, j-1]) - np.cos(theta[i, j]))
z[i, j] = z[i, j-1] + dz
c[i, j] = SOURCE_SOUND_SPEED + SOUND_GRADIENT_SHALLOW * (z[i, j] - SOURCE_DEPTH)
elif (z[i, j-1] > SOURCE_DEPTH) or (z[i, j-1] == SOURCE_DEPTH and theta[i, j-1] < 0):
R[i, j] = -c[i, j-1] / (SOUND_GRADIENT_DEEP * np.cos(theta[i ,j-1]))
theta[i, j] = np.arcsin(
SIMULATION_STEPS / R[i, j-1] + np.sin(theta[i, j-1])
)
dz = R[i, j-1] * (np.cos(theta[i, j-1]) - np.cos(theta[i, j]))
z[i, j] = z[i, j-1] + dz
c[i, j] = SOURCE_SOUND_SPEED + SOUND_GRADIENT_DEEP * (z[i, j] - SOURCE_DEPTH)
plt.figure(figsize=(16,12))
for i in range(0, len(TRANSMISSION_ANGLE_RANGE)):
plt.plot(SIMULATION_RANGE, z[i])
plt.gca().invert_yaxis()
plt.title('Acoustic Ray Tracing')
plt.xlabel('Range (m)')
plt.ylabel('Depth (m)')
plt.show()
100%|██████████| 10000/10000 [00:06<00:00, 1616.31it/s]

duration_sec = 2
dpi = 100
bitrate = 100
fig, ax = plt.subplots(dpi=dpi)
fig.text(0.89, 0.14, '@Jay Patel',
fontsize=12, color='black',
ha='right', va='bottom', alpha=0.75)
fps = len(SIMULATION_RANGE) // duration_sec
GifWriter = animation.ImageMagickFileWriter(fps,
bitrate=bitrate
)
save_filename = 'SOFAR_ray_trace_1.gif'
with GifWriter.saving(fig, save_filename, dpi=dpi):
for i in range(0, len(SIMULATION_RANGE) + 75, 75):
plt.cla()
ax.set_xlim(0, SIMULATION_RANGE[-1])
ax.set_ylim(500, 3500)
ax.set_title(f"Acoustic Ray Tracing \nSOFAR Channel")
plt.gca().invert_yaxis()
plt.xlabel('Range (m)')
plt.ylabel('Depth (m)')
for a in range(0, len(TRANSMISSION_ANGLE_RANGE)):
ax.plot(SIMULATION_RANGE[:i], z[a,:i])
GifWriter.grab_frame()
plt.close()

References
1. https://brentonmallen.com/posts/underwater-acoustic-ray-tracing/Jay Patel
OFI Postdoctoral Fellow in Underwater Communication Systems
My research interests include electronics & communications, distributed underwater robotics, mobile computing and programmable matter.