Collaboration of Multi Domain Marine Robots Towards Above and Below Water Characterization of Floating Targets
Abstract (Best Paper)
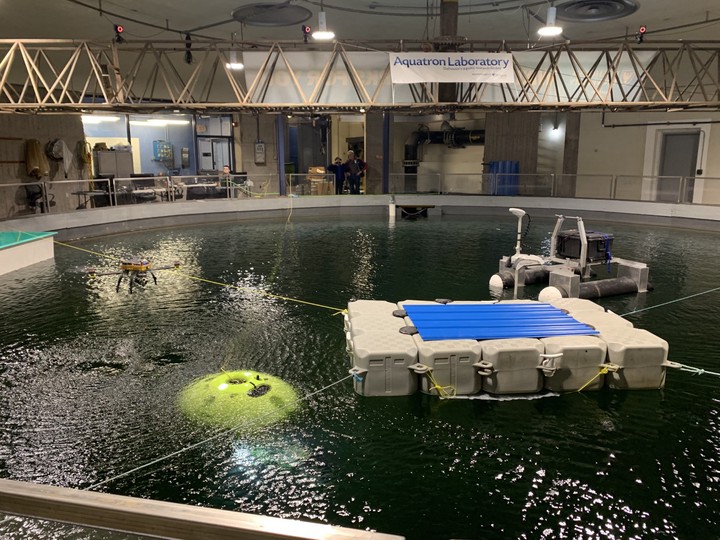
This paper reports on a method to obtain a multi-domain (environment) awareness on a floating target (non-responsive ship, iceberg, other floating structure) using a heterogenous collaborative team of above, surface and underwater robots. This allows, for example, a ship approaching a non-responsive floating target to get information on the target from a safe stand-off prior to getting closer to further investigate or to attempt a boarding. This information enhances the safety of the boarding party. The ship can be a horizon (6 km) away from the floating target. The above-water unmanned aerial vehicles (UAV), integrated with optical cameras, obtains measurements of the above-water geometry using visual imagery to create an above-water three-dimensional model using photogrammetry methods. The below-water unmanned underwater vehicle is integrated with an imaging and profiling bathymetric sonars to capture the submerged hull geometry and features. An unmanned surface vehicle (USV) hosts an intelligent node which centrally controls the robotic collaboration by autonomously planning and distributing the mission for both the UUV and UAV. The results from the two are fused to yield a more complete picture of the floating target. We present results from simulations and a controlled in-water trial with an UUV, USV and UAV. The contributions from this work includes the robotic collaboration and autonomy across multiple domains, autonomous mission-planning and the fusing of multi-domain data. The scheduling of inter-dependent multi-robot task allocation is addressed in the autonomous mission-planning. The approach is validated in simulations and tested in-water. The in-water trials highlight the challenges and value of integrating sensors on distributed multi-domain robots towards a more complete picture on a floating target.
Jay Patel
OFI Postdoctoral Fellow in Underwater Communication Systems
My research interests include electronics & communications, distributed underwater robotics, mobile computing and programmable matter.